
1. Hintergrund
Formula Student zählt zu den anspruchsvollsten Ingenieurwettbewerben weltweit. Die teilnehmenden Teams stehen vor der Aufgabe, unter engen technischen Regularien und in kürzester Zeit leistungsfähige Prototypenfahrzeuge zu entwickeln, zu bauen und im Wettbewerb zu erproben.
In einem derart kompetitiven Umfeld ist jeder Faktor entscheidend, der zur Leistungsoptimierung beiträgt. Eine der zentralen Voraussetzungen für maximale Performance ist die Fähigkeit, den Fahrzeugzustand jederzeit präzise und zuverlässig zu erfassen. Größen wie Geschwindigkeit, Beschleunigung, Gierrate, Radschlupf und sogar Reifenkräfte in Echtzeit zu kennen, kann darüber entscheiden, ob ein Fahrzeug lediglich fährt – oder an der physikalischen Leistungsgrenze agiert.
Mit dem Einzug autonomer Rennfahrzeuge in die Formula Student hat die präzise Zustandsschätzung zusätzlich an Bedeutung gewonnen. Denn neben der Fahrzeugdynamiksteuerung ist sie essenziell für die Stabilität und Sicherheit der autonomen Navigation.
Um diesen Anforderungen gerecht zu werden, haben wir ein eigenes Modul zur Zustandsschätzung entwickelt. Dieses basiert auf Sensorfusion mittels eines Extended Kalman Filters (EKF). Dabei werden Daten von IMU, Radsensoren, Antriebsmomenten und Lenkwinkeln fusioniert, um exakte Geschwindigkeiten zu ermitteln.
Sensoric Solutions ermöglichte uns freundlicherweise, ihren OMS Race Geschwindigkeitssensor zu testen. Zum ersten Mal konnten wir die Ausgaben unseres Schätzalgorithmus mit realen Referenzdaten vergleichen – dem sogenannten Ground Truth.
2. Erfahrungen bei der Integration
Das kompakte Design sowohl des Sensormoduls als auch der zugehörigen ECU erleichterte die Integration erheblich. Die geringe Baugröße ermöglichte uns eine mechanisch stabile und elektrisch günstige Positionierung im Fahrzeug.
Wir entschieden uns, den Sensor nahe des linken Hinterrads anzubringen – direkt hinter der aerodynamischen Seitenstruktur, wie in Abbildung 1 dargestellt. Dafür fertigten wir eine eigene Halteplatte aus Aluminium, die speziell auf die Schnittstelle zum Monocoque unseres Fahrzeugs ausgelegt wurde. Die ECU wurde im vorderen Fahrzeugbereich installiert, sicher befestigt und direkt an das Bordnetz sowie den CAN-Bus angeschlossen.

Befestigung des OMS Race Sensors am Fahrzeug

Nahaufnahme der Befestigung des OMS Race
Die mitgelieferte Konfigurationssoftware des Sensors erwies sich als besonders benutzerfreundlich und intuitiv. Schon beim ersten Setup konnten wir problemlos die Sensorposition relativ zum gewünschten Bezugspunkt (Point of Interest) definieren, sodass alle Messdaten korrekt auf den Schwerpunkt (Center of Gravity) des Fahrzeugs bezogen wurden. Auch die Korrektur des Einbauwinkels ließ sich bereits in der ersten Testsitzung unkompliziert vornehmen und direkt in der Software hinterlegen.
Sehr hilfreich war zudem die zur Verfügung gestellte CAN-DBC-Datei. Sie vereinfachte die Einbindung in unser bestehendes CAN-Datenerfassungssystem erheblich und ermöglichte eine schnelle, reibungslose Integration.
3. Tests und Messergebnisse
Insgesamt führten wir 46,3 km autonome und 32,8 km manuelle Testfahrten durch. Ziel war es, eine möglichst breite Spannweite an Fahrzuständen und Fahrzeugverhalten abzudecken.
Unser Hauptfokus lag auf der Validierung der Genauigkeit unseres Zustandsschätzmoduls – insbesondere der Geschwindigkeitsabschätzungen. Darüber hinaus wollten wir untersuchen, welchen Einfluss präzise Schwimmwinkelmessungen auf unsere Reifenmodelle und Regelstrategien haben könnten.
Für eine aussagekräftige Validierung testeten wir das Fahrzeug unter verschiedensten dynamischen Bedingungen. Dazu zählten unterschiedliche Setups hinsichtlich Fahrwerksauslegung (z. B. Dämpfer- und Stabilisatorabstimmung), sowohl dynamische Fahrzustände als auch stationäre Fahrmanöver sowie verschiedene Torque-Vectoring-Strategien.
Wie in Abbildung 2 ersichtlich, bestand unser wesentlichster Befund im Unterschied der Genauigkeit zwischen den Geschwindigkeitskomponenten in Längsrichtung (vx) und Querrichtung (vy). Während unser EKF für vx zuverlässige Schätzwerte lieferte, zeigte die vy-Schätzung erhebliche Abweichungen. Diese Ungenauigkeiten wirken sich stark negativ auf abgeleitete Größen wie den Schwimmwinkel aus – ein kritischer Parameter, beispielsweise für einen leistungsfähigen, adaptiven Geschwindigkeitsplaner im autonomen Längsregelungssystem.
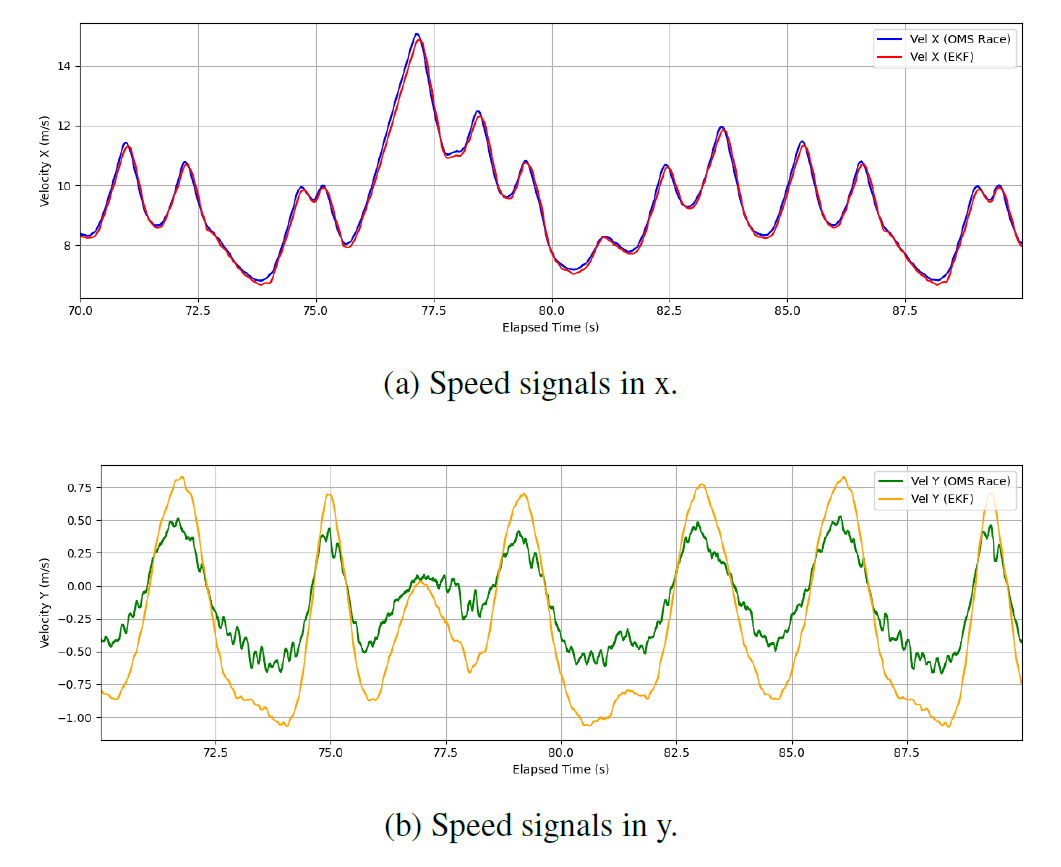
Kurvenfester mit der Geschwindigkeitsmessungen von OMS Race und die Schätzungen aus dem Chalmers EKF.
4. Fazit
Der OMS Race Sensor hat sich in unserem Anwendungsfall als kompakt, durchdacht und äußerst wertvoll erwiesen. Dank der einfachen Integration und der intuitiven Konfigurationssoftware ließ sich das System problemlos installieren und auf die beengten Platzverhältnisse eines Formula-Student-Fahrzeugs anpassen.
Durch die Möglichkeit, den Sensor in vielfältigen Fahrszenarien einzusetzen, konnten wir hochwertige Messdaten erfassen. Diese halfen uns dabei, Ungenauigkeiten in unserem Schätzalgorithmus gezielt zu identifizieren und anschließend zu beheben. Die gewonnenen Erkenntnisse führten nicht nur zur Verbesserung unseres EKF, sondern fließen auch direkt in die Weiterentwicklung präziser Modelle und Regelalgorithmen für unser Fahrzeug ein.
Wir danken Sensoric Solutions herzlich für die Bereitstellung des OMS Race Sensors. Die Arbeit mit diesem professionellen Messsystem war nicht nur technisch bereichernd, sondern auch eine lehrreiche und motivierende Erfahrung. Wir sind überzeugt, dass dieser Sensor für jedes Team, das seine Schätz- und Regelalgorithmen validieren und weiterentwickeln möchte, ein echter Gewinn sein kann.