
Die Herausforderung: Präzision als Schlüssel zur Performance
Die Formula Student zählt zu den anspruchsvollsten Ingenieurwettbewerben der Welt. Studierendenteams aus aller Welt entwickeln und bauen jedes Jahr einen eigenen Formelrennwagen – und treten damit in statischen und dynamischen Disziplinen gegeneinander an. Das Formula Student Team Delft von der TU Delft vereint Studierende aus 22 Ländern und konkurriert seit 1999 auf internationalem Niveau.
Was diese Rennwagen besonders schnell und agil macht, ist die unabhängige Drehmomentregelung an jedem einzelnen Rad – ermöglicht durch vier leistungsstarke Elektromotoren und anspruchsvolle Regelalgorithmen. Die Controls-Abteilung des Teams berechnet laufend die optimale Drehmomentverteilung, um möglichst schnelle Rundenzeiten zu erreichen. Dafür ist eine präzise Zustandsschätzung entscheidend: Geschwindigkeit, Beschleunigung, Gier-, Nick- und Wankwinkel müssen in Echtzeit bekannt sein.
Genau hier lag die Herausforderung: Die bisherige Geschwindigkeitsschätzung basierte auf Raddrehzahlsensoren und Beschleunigungssensoren, kombiniert in einem Kalman-Filter. In Situationen mit erhöhtem Radschlupf – etwa beim schnellen Beschleunigen aus niedrigen Geschwindigkeiten oder bei starkem Bremsen – traten jedoch Abweichungen von bis zu 4 m/s auf. Ausgerechnet in diesen Momenten, in denen die Traktionskontrolle auf exakte Daten angewiesen ist, war die Schätzung am ungenauesten.
Die Lösung: Der OMS Race als Ground-Truth-Referenz
Um diese Lücke zu schließen, setzte das Team auf den OMS Race Geschwindigkeitssensor von Sensoric Solutions. Der optische Sensor misst die Fahrzeuggeschwindigkeit berührungslos und völlig unabhängig vom Radschlupf – und liefert damit erstmals eine zuverlässige Referenz (Ground Truth), gegen die der Schätzalgorithmus validiert und verbessert werden konnte.
Die Integration in das Fahrzeug DUT 25 gelang reibungslos: Der Sensor wurde zwischen den hinteren Radaufhängungselementen auf der rechten Fahrzeugseite montiert. Diesen Einbauort wählte das Team bewusst, da dort bereits elektrische Komponenten vorhanden waren, der Sensor die Aerodynamik kaum beeinflusste und die Verbindung zum CAN-Bus über eine nahegelegene Kabeldurchführung einfach herzustellen war. Eine eigens entwickelte Halterung mit strukturellem Klebstoff sorgte für eine stabile, regelkonforme Befestigung – ohne Bohrungen im tragenden Chassis.
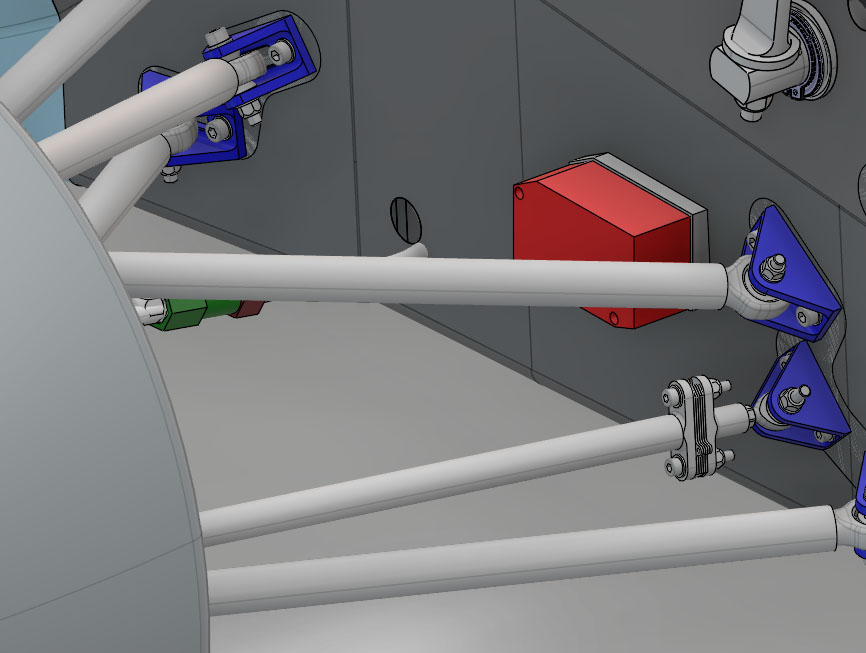
Location of the OMS Race on the DUT 25
Die Ergebnisse: Bessere Daten, bessere Performance
Präzise Geschwindigkeit – auch unter Schlupf
Der direkte Vergleich zwischen OMS-Race-Daten und der bisherigen Schätzung zeigte eindrucksvoll den Unterschied: Während die raddrehzahlbasierte Schätzung bei starker Beschleunigung oszillierende Geschwindigkeitsverläufe lieferte, zeichnete der OMS Race einen gleichmäßigen, physikalisch plausiblen Verlauf auf. Eine unabhängige IMU bestätigte, dass die Beschleunigung während des gesamten Zeitraums durchgehend positiv war – die Oszillationen der alten Schätzung waren also Artefakte des Radschlupfs.
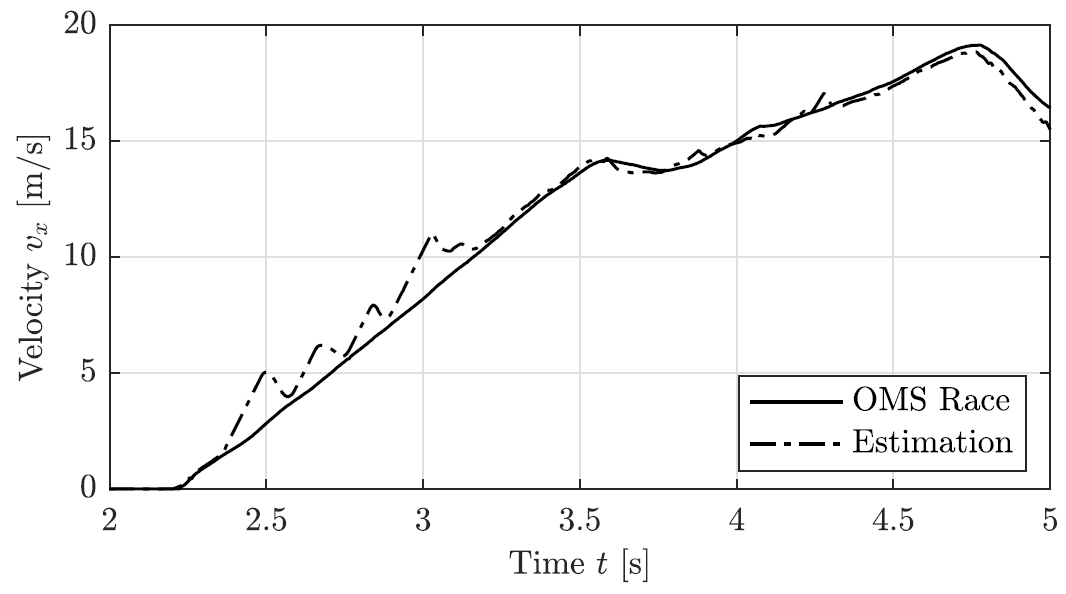
Vom OMS Race gemessene Fahrzeuggeschwindigkeit im Vergleich zur vorherigen Geschwindigkeitsschätzung während des Beschleunigungsvorgangs.
Mit den OMS-Race-Daten konnte das Team seine Geschwindigkeitsschätzung gezielt korrigieren. Das Resultat: eine deutlich konsistentere Traktionskontrolle, insbesondere in kritischen Momenten mit eingeschränktem Gripniveau. Weniger unkontrollierter Radschlupf bedeutet unmittelbar bessere Längsbeschleunigung – ein entscheidender Vorteil im Wettbewerb.
Nick- und Wankwinkel: Mehr Einblick in die Fahrdynamik
Neben der Geschwindigkeit lieferte der OMS Race auch präzise Nick- und Wankwinkeldaten. Im Unterschied zu reinen Federwegssensoren erfasst der optische Sensor auch die Reifenverformung – ein wesentlicher, aber häufig vernachlässigter Anteil der tatsächlichen Fahrzeugbewegung. Diese Daten fließen direkt in die Verbesserung der Fahrdynamikmodelle ein.
Schwimmwinkel: Neue Möglichkeiten für die Regelung
Besonders wertvoll: Erstmals stand dem Team eine zuverlässige Schwimmwinkelmessung (Sideslip) zur Verfügung. Die robuste Schätzung der Quergeschwindigkeit mit Bordsensoren allein ist äußerst schwierig. Der OMS Race machte es möglich, diese Information erstmals direkt in die Fahrzeugregelung einzubeziehen – mit dem Potenzial, Stabilität und Performance weiter zu steigern.
Das Fazit: Podium dank Messtechnik
Der OMS Race hat sich für das Formula Student Team Delft als entscheidendes Werkzeug erwiesen – sowohl für die unmittelbare Leistungsoptimierung als auch als Entwicklungstool für die Zukunft. Die schlupfunabhängigen Geschwindigkeitsmessungen ermöglichten präzisere Schätzungen, konsistentere Traktionskontrolle und letztlich eine bessere Nutzung des verfügbaren Reifengrips. Das Ergebnis: ein Podiumsplatz bei der Formula Student Germany.
Auch in den kommenden Saisons plant das Team, die gewonnenen Daten weiter zu nutzen und insbesondere die Schwimmwinkelinformationen vertieft in die Regelalgorithmen zu integrieren.
„Basierend auf unserer Erfahrung empfehlen wir den OMS Race nachdrücklich für Anwendungen, die eine präzise, schlupfunabhängige Fahrzeugzustandsschätzung erfordern – insbesondere im Hochleistungsmotorsport und in der Entwicklung autonomer Fahrzeuge, wo zuverlässige Sensorik entscheidend für Regelung und modellbasiertes Design ist.“
– Formula Student Team Delft

Den vollständigen Anwendungsbericht lesen
Das Formula Student Team Delft hat seine Erfahrungen mit dem OMS Race in einem ausführlichen Application Report dokumentiert – mit technischen Details zur Integration, Messergebnissen und Vergleichsdaten.